What coordinate system does GPS work in? Global satellite navigation technology: what systems, parameters and functions are there. Geometric accuracy reduction factor
As often happens with high-tech projects, the military initiated the development and implementation of the GPS (Global Positioning System) system. The project of a satellite network for determining coordinates in real time anywhere on the globe was called Navstar (Navigation system with timing and ranging - navigation system for determining time and range), while the abbreviation GPS appeared later, when the system began to be used not only in defense, but also for civilian purposes.
The first steps to deploy a navigation network were taken in the mid-seventies, and commercial operation of the system in its current form began in 1995. IN currently There are 28 satellites in operation, evenly distributed in orbits with an altitude of 20,350 km (24 satellites are sufficient for full functionality).
Looking ahead a little, I will say that a truly key moment in the history of GPS was the decision of the US President to abolish the so-called selective access (SA - selective availability) regime on May 1, 2000 - an error artificially introduced into satellite signals for inaccurate operation of civilian GPS receivers . From now on, the amateur terminal can determine coordinates with an accuracy of several meters (previously the error was tens of meters)! Fig. 1 shows errors in navigation before and after disabling the selective access mode (data). Fig. 1.
Let’s try to understand in general terms how the global positioning system works, and then we’ll touch on a number of user aspects. Let's begin our consideration with the principle of determining range, which underlies the operation of the space navigation system.
Algorithm for measuring the distance from the observation point to the satellite.
Ranging is based on calculating the distance from the time delay of radio signal propagation from the satellite to the receiver. If you know the propagation time of a radio signal, then the path it travels can be easily calculated by simply multiplying the time by the speed of light.
Each GPS satellite continuously generates radio waves of two frequencies - L1=1575.42 MHz and L2=1227.60 MHz. The transmitter power is 50 and 8 Watts, respectively. The navigation signal is a phase-shifted pseudo-random code PRN (Pseudo Random Number code). There are two types of PRN: the first, C/A code (Coarse Acquisition code) is used in civilian receivers, the second P code (Precision code) is used for military purposes, and also, sometimes, for solving problems geodesy and cartography. The L1 frequency is modulated by both C/A and P-code, the L2 frequency exists only for transmitting the P-code. In addition to those described, there is also a Y-code, which is an encrypted P-code (in war time encryption system may change).
The code repetition period is quite long (for example, for a P-code it is 267 days). Each GPS receiver has its own generator, operating at the same frequency and modulating the signal according to the same law as the satellite generator. Thus, from the delay time between identical sections of the code received from the satellite and generated independently, it is possible to calculate the signal propagation time, and, consequently, the distance to the satellite.
One of the main technical difficulties of the method described above is the synchronization of the clocks on the satellite and in the receiver. Even a tiny error by ordinary standards can lead to a huge error in determining the distance. Each satellite carries high-precision atomic clocks on board. It is clear that it is impossible to install such a thing in every receiver. Therefore, to correct errors in determining coordinates due to errors in the clock built into the receiver, some redundancy in the data necessary for unambiguous georeferencing is used (more on this a little later).
In addition to the navigation signals themselves, the satellite continuously transmits various types of official information. The receiver receives, for example, ephemeris (precise data about the satellite’s orbit), a forecast of the delay in the propagation of a radio signal in the ionosphere (since the speed of light changes as it passes through different layers of the atmosphere), as well as information about the performance of the satellite (the so-called “almanac”, which is updated every 12.5 minutes information about the status and orbits of all satellites). This data is transmitted at 50 bps on L1 or L2 frequencies.
General principles of determining coordinates using GPS.
The basis of the idea of determining the coordinates of a GPS receiver is to calculate the distance from it to several satellites, the location of which is considered known (this data is contained in the almanac received from the satellite). In geodesy, the method of calculating the position of an object by measuring its distance from points with given coordinates is called trilateration.  Fig2.
Fig2.
If the distance A to one satellite is known, then the coordinates of the receiver cannot be determined (it can be located at any point on a sphere of radius A described around the satellite). Let the distance B of the receiver from the second satellite be known. In this case, determining the coordinates is also not possible - the object is located somewhere on a circle (shown in blue in Fig. 2), which is the intersection of two spheres. Distance C to the third satellite reduces the uncertainty in coordinates to two points (indicated by two thick blue dots in Fig. 2). This is already enough to unambiguously determine the coordinates - the fact is that of the two possible points of location of the receiver, only one is located on the surface of the Earth (or in the immediate vicinity of it), and the second, false, turns out to be either deep inside the Earth or very high above it surface. Thus, theoretically, for three-dimensional navigation it is enough to know the distances from the receiver to three satellites.
However, in life everything is not so simple. The above considerations were made for the case when the distances from the observation point to the satellites are known with absolute accuracy. Of course, no matter how sophisticated the engineers are, some error always occurs (at least in terms of the inaccurate synchronization of the receiver and satellite clocks indicated in the previous section, the dependence of the speed of light on the state of the atmosphere, etc.). Therefore, to determine the three-dimensional coordinates of the receiver, not three, but at least four satellites are involved.
Having received a signal from four (or more) satellites, the receiver looks for the intersection point of the corresponding spheres. If there is no such point, the receiver processor begins to adjust its clock using successive approximations until it achieves the intersection of all spheres at one point.
It should be noted that the accuracy of determining coordinates is associated not only with the precision calculation of the distance from the receiver to the satellites, but also with the magnitude of the error in specifying the location of the satellites themselves. To monitor the orbits and coordinates of satellites, there are four ground tracking stations, communications systems and a control center controlled by the US Department of Defense. Tracking stations constantly monitor all satellites in the system and transmit data about their orbits to the control center, where updated trajectory elements and satellite clock corrections are calculated. The specified parameters are entered into the almanac and transmitted to the satellites, and they, in turn, send this information to all operating receivers.
In addition to those listed, there are many more special systems, increasing the accuracy of navigation - for example, special signal processing circuits reduce errors from interference (interaction of a direct satellite signal with a reflected signal, for example, from buildings). We will not delve into the specifics of the functioning of these devices, so as not to unnecessarily complicate the text.
After canceling the selective access mode described above, civilian receivers are “locked to the terrain” with an error of 3-5 meters (the height is determined with an accuracy of about 10 meters). The given figures correspond to the simultaneous reception of a signal from 6-8 satellites (most modern devices have a 12-channel receiver that allows you to simultaneously process information from 12 satellites).
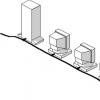
The so-called differential correction mode (DGPS - Differential GPS) allows you to qualitatively reduce the error (up to several centimeters) in coordinate measurement. The differential mode consists of using two receivers - one is stationary at a point with known coordinates and is called “base”, and the second, as before, is mobile. The data received by the base receiver is used to correct the information collected by the mobile device. Correction can be carried out both in real time and during “offline” data processing, for example, on a computer.
Typically, a professional receiver belonging to a company specializing in the provision of navigation services or engaged in geodesy is used as a base one. For example, in February 1998, near St. Petersburg, the NavGeoCom company installed Russia's first differential GPS ground station. The station's transmitter power is 100 Watts (frequency 298.5 kHz), which allows you to use DGPS at a distance of up to 300 km from the station by sea and up to 150 km by land. In addition to ground-based base receivers, the OmniStar satellite differential service system can be used for differential correction of GPS data. Data for correction is transmitted from several geostationary satellites of the company.
It should be noted that the main customers of differential correction are geodetic and topographic services - for a private user, DGPS is not of interest due to the high cost (the OmniStar service package in Europe costs more than $1,500 per year) and the bulkiness of the equipment. And it’s unlikely that situations arise in everyday life when you need to know your absolute geographic coordinates with an error of 10-30 cm.
In conclusion of the part telling about the “theoretical” aspects of the functioning of GPS, I will say that Russia, in the case of space navigation, has gone its own way and is developing its own GLONASS system (Global Navigation Satellite System). But due to lack of proper investment, there are currently only seven satellites in orbit out of the twenty-four needed for the normal functioning of the system...
Brief subjective notes from a GPS user.
It just so happened that I learned about the possibility of determining my location using a wearable device the size of a cell phone in the year 1997 from some magazine. However, the wonderful prospects drawn by the authors of the article were mercilessly crushed by the price of the navigation device stated in the text - almost 400 dollars!
A year and a half later (in August 1998), fate brought me to a small sports store in the American city of Boston. Imagine my surprise and joy when, on one of the windows, I accidentally noticed several different navigators, the most expensive of which cost $250 (simple models were offered for $99). Of course, I could no longer leave the store without the device, so I began to torture the sellers about the characteristics, advantages and disadvantages of each model. I didn’t hear anything intelligible from them (and not at all because I don’t know English well), so I had to figure it out myself. And as a result, as often happens, the most advanced and expensive model was purchased - Garmin GPS II+, as well as a special case for it and a power cord from the car's cigarette lighter socket. The store had two more accessories for my now device - a device for mounting the navigator on a bicycle handlebar and a cord for connecting to a PC. I played with the latter for a long time, but in the end I decided not to buy it because of the high price (a little over $30). As it turned out later, I didn’t buy the cord completely correctly, because the entire interaction of the device with the computer comes down to “fading” the route traveled into the computer (as well as, I think, coordinates in real time, but there are certain doubts about this), and even then subject to the purchase of software from Garmin. Unfortunately, there is no option to load maps into the device.
 Giving detailed description I will not have my device, if only because it has already been discontinued (those who wish to familiarize themselves with the detailed technical characteristics can do this). I will only note that the weight of the navigator is 255 grams, dimensions are 59x127x41 mm. Thanks to its triangular cross-section, the device is extremely stable on a table or car dashboard (Velcro is included for a more secure fit). Power is supplied from four AA batteries (they are only enough for 24 hours of continuous operation) or external source. I’ll try to talk about the main capabilities of my device, which, I think, have the vast majority of navigators on the market.
Giving detailed description I will not have my device, if only because it has already been discontinued (those who wish to familiarize themselves with the detailed technical characteristics can do this). I will only note that the weight of the navigator is 255 grams, dimensions are 59x127x41 mm. Thanks to its triangular cross-section, the device is extremely stable on a table or car dashboard (Velcro is included for a more secure fit). Power is supplied from four AA batteries (they are only enough for 24 hours of continuous operation) or external source. I’ll try to talk about the main capabilities of my device, which, I think, have the vast majority of navigators on the market.
At first glance, GPS II+ can be mistaken for a mobile phone released a couple of years ago. As soon as you look closely, you notice an unusually thick antenna, a huge display (56x38 mm!) and a small number of keys, by telephone standards.
When you turn on the device, the process of collecting information from satellites begins, and a simple animation (a rotating globe) appears on the screen. After the initial initialization (which takes a couple of minutes in an open place), a primitive map of the sky appears on the display with the numbers of visible satellites, and next to it is a histogram indicating the signal level from each satellite. In addition, the navigation error is indicated (in meters) - the more satellites the device sees, the more accurate the coordinates will be, of course.
The GPS II+ interface is built on the principle of “turning” pages (there is even a special PAGE button for this). The “satellite page” was described above, and besides it, there is a “navigation page”, “map”, “return page”, “menu page” and a number of others. It should be noted that the described device is not Russified, but even with poor knowledge of English you can understand its operation.
The navigation page displays: absolute geographic coordinates, distance traveled, instantaneous and average speed, altitude, travel time and, at the top of the screen, an electronic compass. It must be said that the altitude is determined with a much greater error than two horizontal coordinates (there is even a special note about this in the user manual), which does not allow the use of GPS, for example, to determine altitude by paragliders. But the instantaneous speed is calculated extremely accurately (especially for fast-moving objects), which makes it possible to use the device to determine the speed of snowmobiles (the speedometers of which tend to lie significantly). I can give you “bad advice” - when you rent a car, turn off its speedometer (so that it counts fewer kilometers - after all, the payment is often proportional to the mileage), and determine the speed and distance traveled using GPS (fortunately, it can measure both in miles and in kilometers ).
The average speed of movement is determined by a somewhat strange algorithm - idle time (when the instantaneous speed is zero) is not taken into account in the calculations (more logical, in my opinion, it would be to simply divide the distance traveled by the total travel time, but the creators of GPS II+ were guided by some other considerations).
The distance traveled is displayed on the “map” (the device’s memory lasts for 800 kilometers - with more mileage, the oldest marks are automatically erased), so if you wish, you can see the pattern of your wanderings. The scale of the map varies from tens of meters to hundreds of kilometers, which is undoubtedly extremely convenient. The most remarkable thing is that the device’s memory contains the coordinates of the main settlements all over the world! The USA, of course, is presented in more detail (for example, all areas of Boston are present on the map with names) than Russia (the location of only such cities as Moscow, Tver, Podolsk, etc. is indicated here). Imagine, for example, that you are heading from Moscow to Brest. Find “Brest” in the navigator’s memory, press the special “GO TO” button, and the local direction of your movement appears on the screen; global direction to Brest; the number of kilometers (in a straight line, of course) remaining to the destination; average speed and estimated time of arrival. And so anywhere in the world - even in the Czech Republic, even in Australia, even in Thailand...
No less useful is the so-called return function. The device's memory allows you to record up to 500 key points (waypoints). The user can name each point at his own discretion (for example, DOM, DACHA, etc.), and various icons are also provided for displaying information on the display. By turning on the function of returning to a point (any of the pre-recorded ones), the owner of the navigator receives the same capabilities as in the case with Brest described above (i.e. distance to the point, estimated time of arrival and everything else). For example, I had such a case. Having arrived in Prague by car and settled into a hotel, my friend and I went to the city center. We left the car in the parking lot and went for a wander. After an aimless three-hour walk and dinner at a restaurant, we realized that we had absolutely no memory of where we left the car. It’s night outside, we are on one of the small streets of an unfamiliar city... Fortunately, before leaving the car, I wrote down its location in the navigator. Now, having pressed a couple of buttons on the device, I found out that the car was parked 500 meters away from us and after 15 minutes we were already listening to quiet music while heading to the hotel by car.
In addition to moving to a recorded mark in a straight line, which is not always convenient in city conditions, Garmin offers the TrackBack function - returning along your own path. Roughly speaking, the motion curve is approximated by a number of straight sections, and marks are placed at the break points. On each straight section, the navigator leads the user to the nearest mark, and upon reaching it, automatic switching to the next mark. An extremely convenient function when driving in an unfamiliar area (the signal from satellites, of course, does not pass through buildings, so in order to obtain data on your coordinates in densely built-up conditions, you have to look for a more or less open place).
I will not go further into the description of the device’s capabilities - believe me, in addition to those described, it also has a lot of pleasant and necessary gadgets. Just changing the display orientation is worth it - you can use the device in both horizontal (car) and vertical (pedestrian) positions (see Fig. 3).
I consider one of the main advantages of GPS for the user to be the absence of any fees for using the system. I bought the device once and enjoy it!
Conclusion.
I think there is no need to list the areas of application of the considered global positioning system. GPS receivers are built into cars, cell phones and even watches! Recently I came across a message about the development of a chip that combines a miniature GPS receiver and GSM module- it is proposed to equip dog collars with devices based on it, so that the owner can easily locate a lost dog via a cellular network.
But in every barrel of honey there is a fly in the ointment. In this case, Russian laws play the role of the latter. I will not discuss in detail the legal aspects of the use of GPS navigators in Russia (something about this can be found), I will only note that theoretically high-precision navigation devices (which, without a doubt, are even amateur GPS receivers) are prohibited in our country, and their owners will face confiscation of the device and a considerable fine.
Fortunately for users, in Russia the severity of the laws is compensated by the optionality of their implementation - for example, a huge number of limousines with a GPS receiver antenna puck on the trunk lid drive around Moscow. All more or less serious sea vessels are equipped with GPS (and a whole generation of yachtsmen has already grown up who have difficulty finding their way around using a compass and other traditional means of navigation). I hope that the authorities will not put a spoke in the wheels of technological progress and will soon legalize the use of GPS receivers in our country (they have canceled permits for Cell Phones), and will also give the go-ahead for the declassification and replication of detailed terrain maps necessary for the full use of automobile navigation systems.
May 27, 2008 Bogomazov Alexey 1
The Global Positioning System, or GPS for short, is the world's only fully functional satellite navigation system. More than 25 specialized satellites constantly send precise (primarily time-sensitive) radio signals that are picked up by GPS receivers around the world. This broadcast allows receivers (receivers) to accurately determine their location (longitude, latitude, position above sea level) in any weather, at any time of the day, anywhere in the world.
To date GPS has already become a vital system, it is an integral part of modern navigation on land, at sea, in the air, in addition, it is an important tool for drawing up maps, as well as monitoring changes in the landscape of the earth's surface. This system makes a certain contribution to such seemingly unrelated industries as telecommunications and various types of scientific research (for example, research into the nature of earthquakes).
GPS system was developed by the US Department of Defense and is controlled by it. Despite the fact that the maintenance of this system costs approximately $400 000 000 per year (if you count the aging of satellites), mere mortals can freely use it for their modest needs.
At the end of 2005, another next-generation satellite was added to the already launched satellites. This satellite had a number additional features, one of which is support for a second civilian GPS signal, called L2C, which is designed to improve the accuracy and reliability of the system as a whole. In the coming years, they plan to launch more and more modernized satellites, in the future they should add third and fourth signals, and in addition, a bunch of new capabilities that will be used exclusively by the military (who would doubt it).
In August 2000, The Wide-Area Augmentation System (WAAS) became publicly available, or, in human terms, a panoramic viewing system that made it possible to determine the location of a portable GPS receiver with an accuracy of two meters. Two meters, of course, is not bad, but you can achieve an accuracy of one centimeter if you use Differential GPS (DGPS).
Areas of use of GPS
Many people have probably heard about GPS, many people use it daily. However, for the vast majority of people, this remains only a technology that allows them to determine their location on the surface of the Earth. In fact, this is a little different; this technology is used in a wide variety of areas of human activity.

It must be said that without accurate time synchronization, the level of errors in the transmission of information will immediately increase, and in some cases the transmission will become impossible. This is due to the nuances of equipment implementation. For example, with a certain implementation of transmission in ordinary local networks, network cards must synchronize almost after each byte is transmitted. This is, of course, a completely distant example, but imagine what level of synchronization must be in much more serious industrial and scientific installations.
The atomic clocks on the satellites are counting down GPS time". This time is measured in days, hours, minutes, seconds, and so on. In general, everything is the same as in earthly time, which is based on the rotation of the Earth. The main difference is that GPS time is absolutely independent of the rotation of the Earth. A GPS day is 86400 seconds in SI (by the way, SI, this is not a measurement system, this is international system , seems like a trifle, but not everyone knows), which is the International Atomic Time (TAI) standard.
IN 1980 GPS time has been equated to Coordinated Universal Time (UTC). Thus, the GPS clock began ticking on January 6, 1980 at 00:00:00 UTC (00:00:19 TAI), with a difference of 19 seconds due to the obscure "leap seconds". But we are already going into the jungle of special disciplines, so if anyone is interested, go ahead, and at the same time learn the theory of relativity, it comes up here at every step.
- Geophysics and Geology . Highly accurate voltage measurements of different layers of the earth can be made using GPS. First, let's look at voltage, this has nothing to do with batteries, here it is rather the deformation and displacement of rocks under the influence of any forces. To measure this value, it is enough to take 2 GPS receivers, one of which should be stationary (as far as possible), then it is easy to determine the displacement of the second receiver relative to the first, which will be the desired value. This technology has applications in monitoring volcanoes, and makes it possible to predict in advance the cause and shape of future changes in the surrounding landscape.
History of GPS development
Development GPS based in part on similar terrestrial radio navigation systems such as LORAN(was developed in the early 1940s and used during World War II). An additional impetus for the development of this system was the launch of the first artificial satellite in the USSR in 1957. A team of American scientists led by Dr. Richard B. Kershner monitored the transmission of radio signals from the satellite. They noticed an interesting pattern. According to the Doppler effect, the frequency of the radio signal sent by a satellite decreases with increasing distance from the satellite (the further the signal has traveled, the lower its frequency). They soon realized that, knowing their exact position on the earth's globe, as well as the frequency of the signals sent by the satellite, they could accurately determine the location of the satellite in the earth's orbit (in accordance with the calculations of the same Doppler). It is not difficult to understand that the opposite statement is also true; knowing the location of the satellite and the frequency of the signal, you can determine your location on Earth.
First satellite navigation system Transit(used by the US Navy) was successfully tested in 1960. This system used 5 satellites and allowed navigation adjustments to be made approximately every hour. In 1967, the US Department of the Navy developed a new satellite, Timation, which made it possible to place on board, and actually launch into orbit, an accurate clock (the technology on which GPS relies). In the 1970s, the Omega Navigation System became the first radio navigation system to cover the entire globe. This system was based on comparing the phases of signals.
First experimental Block-I The GPS satellite was launched in February 1978. The first GPS satellites were manufactured by Rockwell International and are now manufactured by Lockheed Martin. After the events of 1983, when the USSR air defense system shot down a passenger airliner KAL 007 in its airspace (the plane entered Soviet airspace by mistake), killing everyone on board (269 people in total), US President Ronald Reagan announced that GPS could become available to civilians immediately after its construction is completed. By 1985, more had been launched into orbit. 10 Block-I satellites. The first modern Block-II satellite was launched February 14, 1989. By December 1993, the number of satellites had been increased to the number at which the system could already function, and by January 17, 1994, all 24 satellites were in orbit.
In 1996, US President Bill Clinton fully realized the importance of GPS not only for military purposes, but also for civilian use. After this, a directive is issued establishing the status of GPS as a dual system (for both military and civilian). In 1998, US Vice President Al Gore announced plans to add two more civilian signals to GPS to improve the accuracy and reliability of the system, as well as to ensure a higher level of flight safety.
The last satellite launch took place in September 2005, while the launch date of the oldest GPS satellite currently in operation is February 1989.
GPS satellites
The GPS system uses satellites located in a certain way, or rather on Intermediate circular orbit (ICO). These are orbits between Earth orbit (1400 km) and geosynchronous orbit (35790 km). In addition, there are three unused satellites in constant orbit in case of unforeseen situations and all kinds of malfunctions and errors. Each satellite orbits the Earth exactly twice a day at an altitude of 20,200 km. The orbits are located in such a way that at any given time, almost any point on the earth’s surface is covered by four satellites at once. There are six active satellites in each of the six orbital planes. The orbit of each satellite is tilted 55 degrees from the equatorial plane.
The position of the satellites is controlled by five ground stations located around the world (Hawaii, Kwajalein, Ascension Island, Diego Garcia, Colorado Springs). In addition, there is one main station (air base Falcon in pcs. Colorado), which transmits all information to satellites through secondary tracking stations. This information typically contains time adjustments down to one microsecond.
Each satellite regularly transmits time, according to its atomic clock, and other information in digital form to the outside world. Typically, satellites broadcast their exact position in orbit and the approximate position of all other active GPS satellites. It would seem, why transmit information about the location of other satellites, but ground-based receivers select the strongest signal received, and then, based on the information received, they try to catch weaker signals from other satellites.
GPS receivers
The main purpose of a GPS receiver is to determine its location on the Earth's surface. This position is uniquely determined using three parameters - geographic latitude and longitude, as well as position above sea level. In addition, the receiver must determine the exact time, not in the sense of what time it is, but in the sense of precise synchronization with the satellite. All these parameters are determined using the process trilateration. In a nutshell, trilateration consists of finding the position of an object using at least four points with known coordinates and known distances from each point to the object. Generally speaking, they find not the distance, but pseudorange (pseudorange), which is a first approximation of the distance.
So, the satellites send a signal that encrypts their own coordinates and the time the signal was sent. Having received the signal, the receiver decrypts it, calculates the orbit of each satellite, and then finds the distance to these satellites. The distance calculation is made taking into account the delay between the time when the signal was sent and when it was received. Thus, knowing the time during which the signal arrived, it is easy to find the distance by multiplying it by the speed of the signal.
The process of accurately determining latency is perhaps the most time-consuming. Each satellite periodically sends 1023 bits pseudo arbitrary sequence ( pseudo random sequence), is a sequence that has only some properties of being arbitrary. Each satellite has a different sequence, allowing them to share the same radio frequencies using parallel code division access ( Code division multiple access). The receiver generates the sequences that each satellite sends and compares them with those received, so the receiver can easily recognize each of the satellites.
Let's return to the issue of trilateration. The receiver has already determined 4 satellite positions and 4 distances to them. Now imagine 4 spheres with centers in the places where the satellites are located and radii equal to the distances to the satellites. Generally speaking, based on school stereometry, 3 options are possible: 2 intersection points, one intersection point and no intersection points. For obvious reasons, the intersection point is the location of the receiver. Two points are possible if all satellites are in the same plane, which is not always possible (3 satellites always lie in the same plane). This option is also acceptable in principle, since one point is located somewhere on Earth, and the second is symmetrical relative to the plane in which the satellites lie, or rather somewhere in space. Selecting the one you need is quite simple. If there is only one intersection point, then it is the desired one.
When real receivers operate, everything is somewhat more complicated, due to several very specific reasons. The cost of a GPS receiver starts from $90 , and the cost of an atomic clock is approximately equal to the cost of several dozen products from the German automobile industry, and 50 Mercedes are clearly more expensive than 50 bucks. Thus, calculating the distance is not so easy. Fortunately, ordinary clocks are quite accurate, which, to our great joy, can give a fairly accurate comparison for the time of the signal. As a result, an error in determining the geographical position arises, fortunately small (the spheres intersect around one point).
A little higher, when I talked about calculating the distance, it was not for nothing that I passed by the signal speed, this is one of the largest GPS problems. If you solved school problems in physics, then there this speed is considered equal to the speed of light in a vacuum, which, generally speaking, is not true, light moves slower in air, another thing is that the ratio of these speeds is equal to one and the first digit after zero is somewhere far enough. However, when calculating the exact position, these figures make a significant contribution. The worst thing is that the speed of the signal in the ionosphere (the problem is mainly here) changes almost unpredictably, and the thicker the layer through which the signal must pass, the greater the error can be. If the satellite hangs directly above the receiver, then the error is minimal. If not, then the error grows with the satellite’s deviation angle to the horizon. To correct this error, the approximate position of the receiver is first determined, and then a mathematical model is built and, based on it, the error is eliminated.
The change in the speed of a radio signal in the ionosphere depends on its frequency, so the second frequency L2(more on this below) to resolve this error. Some military and expensive civilian (usually used for monitoring) receivers can compare frequencies L1 And L2, calculate the signal delay in the atmosphere and make precise adjustments.
GPS signals are subject to scattering and reflection on the surrounding surface - buildings, terrain, dense types of soil, etc. This is the reason for another error. Many reception techniques are designed to reduce this error (in particular Narrow Correlator spacing- a rather specific question, as I understand it, they compare the resulting function with what should be with fairly strict conditions). If the signal gets lost and travels somewhere for a long time, then the receiver itself is able to recognize this and ignore such a signal. If the signal has only been reflected, for example, from the earth's surface, it is much more difficult to filter it (special antennas are used). This is due to the fact that such errors are hardly noticeable when compared with the main signal and are very similar to distortions caused by ordinary movements of air masses.
Many GPS receivers can transmit information to a PC or other devices using NMEA 0183 protocol. NMEA 2000- a newer, but less common protocol.
GPS frequencies
So, let's consider several frequencies that are present in the spectrum of electromagnetic waves (radio waves) GPS: (Why several? The system is half military, no one will tell you the whole truth).
- L1 (1575.42 MHz): first carrier frequency;
- L2 (1227.60 MHz): second carrier frequency; The satellite emits sine waves at these two frequencies. As mentioned above, before being sent, these signals are modulated with a pseudo random sequence (phase shift keying). The L1 frequency is modulated by two types of codes: a C/A code (free access code) and a P(Y) code (authorized access code), and the L2 frequency is modulated only by a P code. Don’t forget about information about the position of satellites and time, which is also present in this signal. Coarse Acquisition C/A (free access code) has a pulse frequency of 1023 MHz and a repetition period of 0.001 sec. This code is decoded without problems, but determining the exact position with its help is almost impossible. Protected code P(Y) (authorized access code) has a pulse repetition rate of 10.23 MHz and a repetition period of 7 days. This code changes once a week, and only authorized Department of Defense officials can make changes to it. More precisely, they could have, the Americans made a mistake and the information leaked from them. We had to take additional security measures: the Anti Spoofing mode can be launched at any time. In this case, the P signal is encoded and turned into a Y signal, which can only be decrypted in hardware. Selective Availability SA (SA, selective access mode) is specially designed to protect against unauthorized users. When this mode operates, the information message does not send information about the position of the satellites and time, but slightly corrected information. Small corrections are made (10 meters horizontally and 30 meters vertically, approximately of course) and the accuracy of the determination immediately decreases significantly.
- L3 (1381.05 MHz): This is a contribution of satellites to the US defense program, this frequency is designed to detect missile launches, nuclear explosions and other events accompanied by releases of large amounts of energy;
- L4 (1841.40 MHz): signal for additional error correction when the signal passes through the ionosphere;
- L5 (1176.45 MHz): frequency for the safety-of-life (SoL) signal. Distress signals will be issued on this frequency, with minimal or no reception errors predicted. The first Block-IIF satellite to support broadcasting on this frequency is due to be launched in 2008.
GPS Improvement Possibilities
- Differential GPS (DGPS) - differentialGPS. Allows you to increase the accuracy of determination from 4-20 meters to 1-3 meters. The principle is to create a ground-based network of stationary GPS receivers that calculate their coordinates based on satellite readings (which always have an error) and compare them with their coordinates, which are known in advance. The correction is broadcast in local space as an FM signal. This method allows low-cost civilian receivers to significantly increase their accuracy.
- The Wide Area Augmentation System (WAAS) - panoramic view system. Ground stations are being built, which do approximately the same thing as in the previous case, only they do not broadcast it on the air, but transmit it to additional satellites in geosynchronous orbit, and they, in turn, broadcast it on the air, in addition, they report information about the signal delay in the ionosphere, etc. This system can significantly help in aeronautics in conditions of poor and zero visibility. Unfortunately, only a few WAAS satellites are currently launched. Currently, this system operates only in areas of the west and east coasts of the United States. However, analogues of this system are being created in Europe (EGNOS, the Euro Geostationary Navigation Overlay Service), and Japan (MSAS, the Multi-Functional Satellite Augmentation System). These systems are almost identical to WAAS.
- A Local Area Augmentation System (LAAS) . The correction is similar to the previous case, but the broadcast occurs not from a satellite, but from a ground station, near which increased accuracy is required (for example, an airport).
GPS (short for Global Positioning System) is a satellite navigation system operating in the WGS 84 global coordinate system. GPS allows you to determine the location and speed of objects almost anywhere on Earth. Interestingly, the system was developed and implemented by the US Department of Defense, but is currently used for civilian purposes. Russia has created its own satellite navigation system, which is called and we have already written about it. The systems work similarly, but GLONASS satellites are more stable.

Some time ago, GPS was rarely used in phones, and therefore it was a kind of curiosity that could surprise people. But those days are long gone and today you need to work hard to find a smartphone that does not support GPS.
Why do you need GPS in your phone/smartphone/tablet?
GPS is used primarily to determine the location of a device. Based on this, the user can understand where he is at the moment. Navigation maps, which are used, for example, by car enthusiasts, are based on this principle. And coupled with the Internet, maps can show not only the location of the device and the path to the goal, but also traffic congestion. A striking example is Yandex.Maps.

Smartphones with GPS are used not only by ordinary motorists, they are very popular among couriers, as well as taxi drivers - especially when it comes to large cities.
The location feature is used in some services. For example, in social network you can post a photo and specify the coordinates where it was just captured. There are services that allow you to mark your location not on simple maps, and in a store or cafe - this way the user can send his message to friends and invite them.

There are even dating services based on the user's current location. So, the user indicates where he is and sees other users on the map. For example, users can get to know each other if they are in close proximity on the map.
Are there any disadvantages to GPS?
There are no disadvantages to GPS as such, but it is worth remembering that the location may not always be reliable, as there are limits of error. For more accurate positioning, you can use both navigation systems at once - GPS and GLONASS, especially since they are both used in many devices.
Otherwise, GPS has solid advantages. In addition, the system actually has no effect on the cost of the device, which you can see in the cost of smartphones: even the most inexpensive devices are equipped with GPS.
GPS is a satellite navigation system that measures distance, time and determines location. Allows you to determine the location and speed of objects anywhere on Earth (not including the polar regions), in almost any weather, as well as in outer space near the planet. The system is developed, implemented and operated by the US Department of Defense.
Brief characteristics of GPS
The US Department of Defense satellite navigation system is GPS, also called NAVSTAR. The system consists of 24 navigation artificial earth satellites (NES), ground command-measuring complex and consumer equipment. It is a global, all-weather, navigation system that provides the determination of the coordinates of objects with high accuracy in three-dimensional near-Earth space. GPS satellites are placed in six medium-high orbits (altitude 20,183 km) and have an orbital period of 12 hours. The orbital planes are spaced at 60° intervals and inclined to the equator at an angle of 55°. There are 4 satellites in each orbit. 18 satellites is the minimum number to ensure visibility of at least 4 satellites at every point on Earth.
The basic principle of using the system is to determine location by measuring distances to an object from points with known coordinates - satellites. The distance is calculated by the delay time of signal propagation from sending it by the satellite to receiving it by the antenna of the GPS receiver. That is, to determine three-dimensional coordinates, the GPS receiver needs to know the distance to three satellites and the time of the GPS system. Thus, signals from at least four satellites are used to determine the coordinates and altitude of the receiver.
The system is designed to provide navigation for air and sea vessels and timing with high precision. It can be used in two-dimensional navigation mode - 2D determination of navigation parameters of objects on the Earth's surface) and in three-dimensional mode - 3D (measurement of navigation parameters of objects above the Earth's surface). To find the three-dimensional position of an object, it is necessary to measure the navigation parameters of at least 4 NIS, and for two-dimensional navigation - at least 3 NIS. GPS uses a pseudo-rangefinder method for determining position and a pseudo-radial velocity method for finding the speed of an object.
To improve accuracy the determination results are smoothed using a Kalman filter. GPS satellites transmit navigation signals at two frequencies: F1 = 1575.42 and F2 = 1227.60 MHz. Radiation mode: continuous with pseudonoise modulation. Navigation signals are a public C/A code (course and acquisition), transmitted only on the F1 frequency, and a protected P code (precision code), emitted on the F1, F2 frequencies.
In GPS, each NIS has its own unique C/A code and unique P code. This type of satellite signal separation is called code separation. It allows on-board equipment to recognize which satellite a signal belongs to when they are all transmitting on the same frequency GPS provides two levels of service to consumers precise definitions(PPS Precise Positioning Service) and standard data (SPS Standard Positioning Service) PPS is based on the exact code, and SPS is based on the publicly available one. The PPS level of service is provided to military and federal services USA, and SPS to the mass civilian consumer. In addition to navigation signals, the satellite regularly transmits messages that contain information about the status of the satellite, its ephemeris, system time, ionospheric delay forecast, and performance indicators. Onboard GPS equipment consists of an antenna and a receiver indicator. The PI includes a receiver, a computer, memory units, control and display devices. The memory blocks store the necessary data, programs for solving problems and controlling the operation of the receiver indicator. Depending on the purpose, two types of on-board equipment are used: special and for the mass consumer. Special equipment is designed to determine the kinematic parameters of missiles, military aircraft, ships and special vessels. When finding object parameters, it uses P and C/A codes. This equipment provides virtually continuous determinations with accuracy: object location— 5+7 m, speed — 0.05+0.15 m/s, time — 5+15 ns
Main applications of GPS navigation satellite system:
- Geodesy: using GPS, the exact coordinates of points and boundaries of land plots are determined
- Cartography: GPS is used in civil and military cartography
- Navigation: GPS is used for both sea and road navigation
- Satellite monitoring of transport: using GPS, the position and speed of vehicles are monitored, and their movement is controlled
- Cellular communications: first Cell phones with GPS appeared in the 90s. In some countries, such as the USA, this is used to quickly determine the location of a person calling 911.
- Tectonics, Plate Tectonics: using GPS to observe the movements and vibrations of plates
- Active recreation: there are various games that use GPS, for example, Geocaching, etc.
- Geotagging: information, such as photographs, is “linked” to coordinates thanks to built-in or external GPS receivers.
Determination of consumer coordinates
Positioning by distances to satellites
The location coordinates are calculated based on the measured distances to the satellites. Four measurements are required to determine the location. Three dimensions are enough if you can exclude implausible solutions by some other accessible ways. Another measurement is required for technical reasons.
Measuring the distance to a satellite
The distance to a satellite is determined by measuring the amount of time it takes for a radio signal to travel from the satellite to us. Both the satellite and the receiver generate the same pseudo-random code strictly simultaneously on a common time scale. Let's determine how long it took the signal from the satellite to reach us by comparing the delay of its pseudo-random code with respect to the receiver code.
Ensuring perfect timing
Accurate timing is key to measuring distances to satellites. Satellites are accurate in time because they have atomic clocks on board. The receiver clock may not be perfect, since its drift can be eliminated using trigonometric calculations. To obtain this opportunity, it is necessary to measure the distance to the fourth satellite. The need for four measurements is determined by the receiver design.
Determining the position of the satellite in outer space.
To calculate our coordinates, we need to know both the distances to the satellites and the location of each in outer space. GPS satellites travel so high that their orbits are very stable and can be predicted with great accuracy. Tracking stations constantly measure small changes in orbits, and data about these changes is transmitted from satellites.
Ionospheric and atmospheric signal delays.
There are two methods that can be used to keep the error to a minimum. First, we can predict what the typical change in velocity would be on a typical day, under average ionospheric conditions, and then apply a correction to all our measurements. But, unfortunately, not every day is ordinary. Another method is to compare the propagation speeds of two signals having different carrier frequencies. If we compare the propagation time of two different-frequency components of the GPS signal, we can find out what kind of slowdown took place. This correction method is quite complex and is used only in the most advanced, so-called “dual-frequency” GPS receivers.
Multipath.
Another type of error is “multipath” errors. They occur when signals transmitted from a satellite are repeatedly reflected from surrounding objects and surfaces before reaching the receiver.
Geometric factor reducing accuracy.
Good receivers are equipped with computational procedures that analyze the relative positions of all observable satellites and select four candidates from them, i.e. best positioned four satellites.
Resulting GPS accuracy.
The resulting GPS error is determined by the sum of errors from various sources. The contribution of each varies depending on atmospheric conditions and the quality of the equipment. In addition, the accuracy can be purposefully reduced by the US Department of Defense as a result of installing the so-called S/A mode (“Selective Availability”) on GPS satellites. limited access). This mode is designed to prevent a potential enemy from gaining a tactical advantage in GPS positioning. When and if this mode is set, it creates the most significant component of the total GPS error.
Conclusion:
Accuracy of measurements using GPS depends on the design and class of the receiver, the number and location of satellites (in real time), the state of the ionosphere and the Earth's atmosphere (heavy clouds, etc.), the presence of interference and other factors. “Household” GPS devices, for “civilian” users, have a measurement error in the range from ±3-5m to ±50m and more (on average, real accuracy, with minimal interference, if new models, is ±5–15 meters in plan). The maximum possible accuracy reaches +/- 2-3 meters horizontally. Height – from ±10-50m to ±100-150 meters. The altimeter will be more accurate if you calibrate the digital barometer by the nearest point with a known exact altitude (from a regular atlas, for example) on a flat terrain or by known atmospheric pressure (if it does not change too quickly when the weather changes). High-precision meters of “geodetic class” - more accurate by two to three orders of magnitude (up to a centimeter, in plan and in height). The actual accuracy of measurements is determined by various factors, for example, distance from the nearest base (correction) station in the system service area, multiplicity (number of repeated measurements / accumulations at a point), appropriate quality control of work, level of training and practical experience of the specialist. Such high-precision equipment can only be used by specialized organizations, special services and the military.
To improve navigation accuracy It is recommended to use a GPS receiver - in an open space (there are no buildings or overhanging trees nearby) with a fairly flat terrain, and connect an additional external antenna. For marketing purposes, such devices are credited with “double reliability and precision” (referring to the two simultaneous satellite systems, Glonass and Gypies), but the actual actual improvement of parameters (increasing the accuracy of determining coordinates) can amount to only up to several tens of percent. Only a noticeable reduction in the hot-warm start time and measurement duration is possible
The quality of GPS measurements deteriorates if the satellites are located in the sky in a dense beam or on one line and “far” - near the horizon (all this is called “bad geometry”) and there is signal interference (high-rise buildings blocking the signal, trees, steep mountains nearby, reflecting the signal ). On the day side of the Earth (currently illuminated by the Sun) - after passing through the ionospheric plasma, radio signals are weakened and distorted an order of magnitude stronger than on the night side. During a geomagnetic storm, after powerful solar flares, interruptions and long interruptions in the operation of satellite navigation equipment are possible.
The actual accuracy of the GPS depends on the type of GPS receiver and the features of data collection and processing. The more channels (there must be at least 8) in the navigator, the more accurately and quickly the correct parameters are determined. When receiving “auxiliary A-GPS location server data” via the Internet (via packet data transfer, in phones and smartphones), the speed of determining coordinates and location on the map increases
WAAS (Wide Area Augmentation System, on the American continent) and EGNOS (European Geostationary Navigation Overlay Services, in Europe) - differential subsystems transmitting through geostationary (at altitudes from 36 thousand km in lower latitudes to 40 thousand kilometers above middle and high latitudes ) satellites correcting information to GPS receivers (corrections are introduced). They can improve the quality of positioning of a rover (field, mobile receiver) if ground-based base correction stations (stationary reference signal receivers that already have a high-precision coordinate reference) are located and operating nearby. In this case, the field and base receivers must simultaneously track the satellites of the same name.

To increase measurement speed It is recommended to use a multi-channel (8-channel or more) receiver with an external antenna. At least three GPS satellites must be visible. The more there are, the better the result. Good visibility of the sky (open horizon) is also necessary. A fast, “hot” (lasting in the first seconds) or “warm start” (half a minute or a minute, in time) of the receiving device is possible if it contains an up-to-date, fresh almanac. In the case when the navigator has not been used for a long time, the receiver is forced to receive the full almanac and, when it is turned on, a cold start will be performed (if the device supports AGPS, then faster - up to a few seconds). To determine only horizontal coordinates (latitude / longitude), signals from three satellites may be sufficient. To obtain three-dimensional (with height) coordinates, at least four coordinates are needed. The need to create our own, domestic navigation system is due to the fact that GPS is American, potential adversaries who can at any time, in their military and geopolitical interests, selectively disable, “jam”, modify it in any region or increase artificial , a systematic error in coordinates (for foreign consumers of this service), which is always present in peacetime.